EdgeGuardian: Edge-AI-Sicherheitszone für Maschinenüberwachung
Entwickelt einen Raspberry-Pi-5- und Hailo-8L-Edge-AI-Prototyp, der kamerabasierte Personenerkennung mit Hokuyo-LiDAR-Distanzmessung kombiniert und lokal SAFE-, WARNING- und ALERT-Zustände entscheidet.
Kurzüberblick
Rolle
End-to-End Engineering: Hardware-Integration, Edge-Inferenz, Sensorfusion, Dashboard-Evidenz und operative Dokumentation.
Umfang
Ich habe die Entscheidungslogik auf einem Raspberry Pi 5 umgesetzt. Die Kamera-Pipeline erkennt die Klasse Person mit YOLO auf dem Hailo-8L-Beschleuniger, der Hokuyo-LiDAR liefert die gemessene Distanz, und das Fusionsskript...
Rahmenbedingungen
Das Design hält Kamera-Inferenz und Sicherheitsentscheidungen lokal auf dem Edge-Gerät, statt Videodaten an einen Cloud-Dienst zu senden. Beispielkonfigurationen vermeiden private Telegram-Secrets, und das Dashboard liest Logs...
Evidenz
End-to-End lokale Edge-AI-Sicherheitsüberwachung mit Kamera, LiDAR, Embedded-Aktuatorik, Dashboard und Logs demonstriert
Architektur
Sensorik und Aktuatorik
Raspberry-Pi-Kamera / AI Camera, Hokuyo URG-04LX-UG01 LiDAR und ESP32-S3-Serial-Endpunkt liefern visuelle Erkennung, physische Distanzbestätigung und Aktuatornachweis.
Edge-Fusion
Der Raspberry Pi 5 führt die Fusion aus, verarbeitet Hailo-Erkennungsdaten, liest LiDAR-Distanzen, wendet SAFE/WARNING/ALERT-Schwellen an und protokolliert jede Entscheidung.
Evidenz-Ausgaben
Die Sicherheitsentscheidung bleibt lokal; Evidenz wird über Browser-Dashboard, optionales Telegram-Modul, Terminalausgabe und finale CSV-Logs sichtbar gemacht.
Sensorik und Aktuatorik
Raspberry-Pi-Kamera / AI Camera, Hokuyo URG-04LX-UG01 LiDAR und ESP32-S3-Serial-Endpunkt liefern visuelle Erkennung, physische Distanzbestätigung und Aktuatornachweis.
Edge-Fusion
Der Raspberry Pi 5 führt die Fusion aus, verarbeitet Hailo-Erkennungsdaten, liest LiDAR-Distanzen, wendet SAFE/WARNING/ALERT-Schwellen an und protokolliert jede Entscheidung.
Evidenz-Ausgaben
Die Sicherheitsentscheidung bleibt lokal; Evidenz wird über Browser-Dashboard, optionales Telegram-Modul, Terminalausgabe und finale CSV-Logs sichtbar gemacht.
Technische Diagramme
Die Architekturdiagramme dienen als Review-Artefakte, damit Systemgrenzen, Runtime-Flüsse und operative Entscheidungen schnell prüfbar sind.
Systemkontext
Kamera- und LiDAR-Inputs werden lokal auf dem Raspberry Pi 5 mit Hailo-Beschleunigung verarbeitet und zu SAFE/WARNING/ALERT-Ausgaben für Dashboard, ESP32-Aktuatorik, optionale Telegram-Alerts und CSV-Evidenzlogs fusioniert.
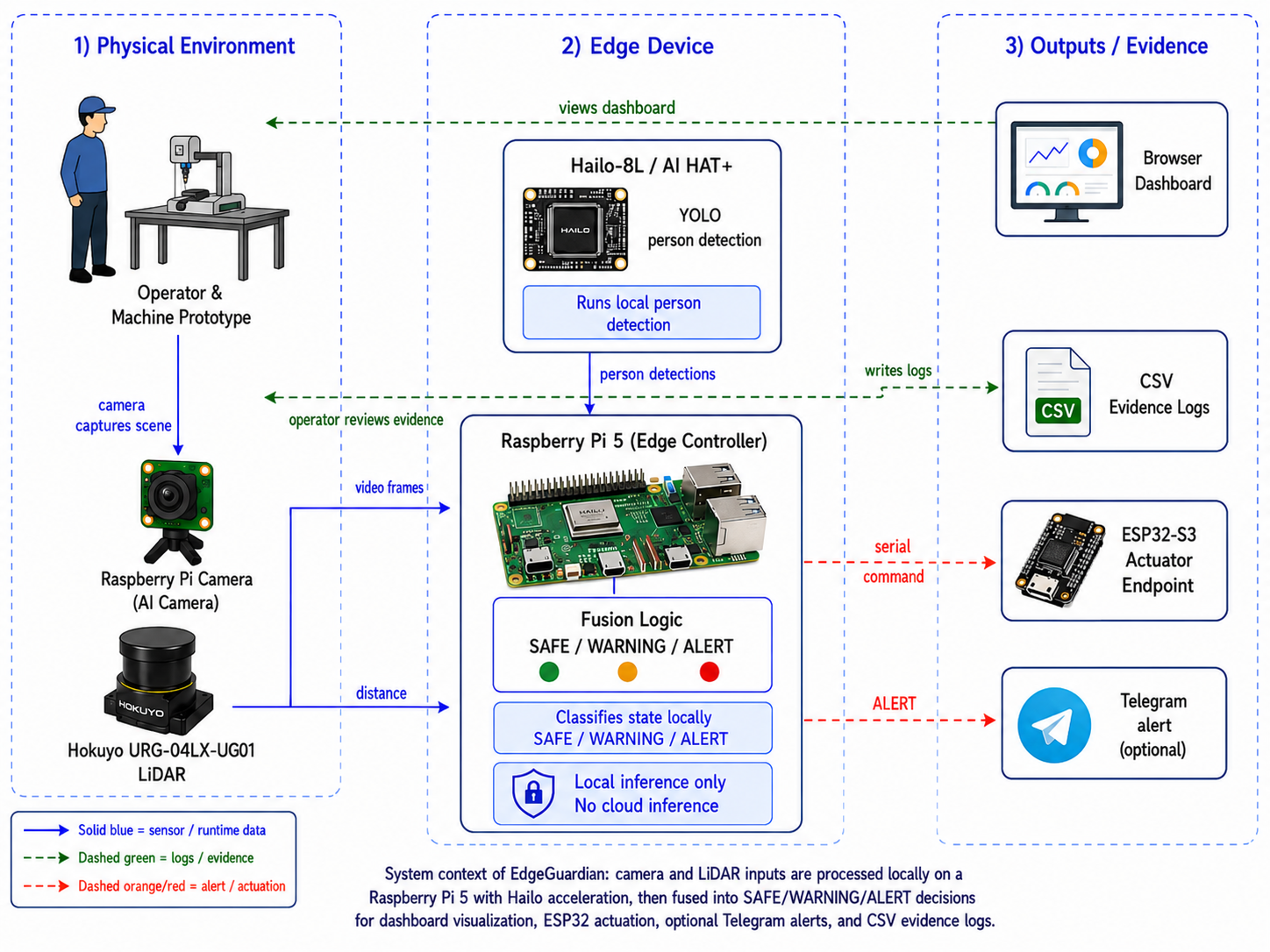
Review-Fokus
- Lokaler Inferenzpfad: Kameraframes und LiDAR-Distanz bleiben in der Raspberry-Pi-Runtime
- Getrennte Evidenz-Ausgaben: Dashboard, CSV-Logs, optional Telegram und ESP32-Aktuatornachweis
- Die Sicherheitsentscheidung wird über SAFE/WARNING/ALERT-Zustandswechsel sichtbar
Container- / Deployment-Ansicht
Physische Sensoren speisen eine Raspberry-Pi-5-Runtime mit Hailo-beschleunigter Personenerkennung, Fusionslogik, ESP32-Serial-Aktuatorik, Dashboard-Visualisierung, optionalen Telegram-Alerts und Evidenzlogs.
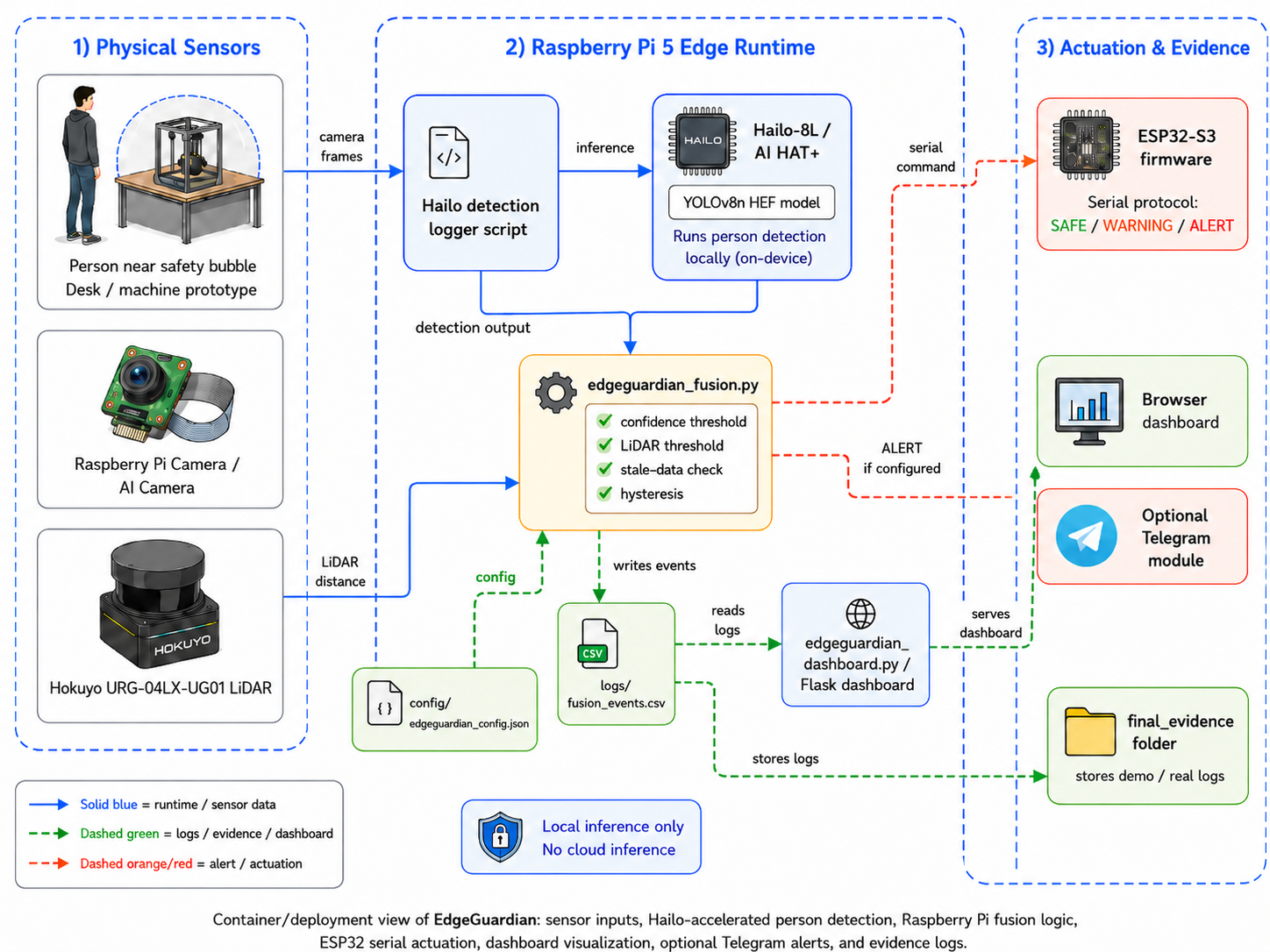
Review-Fokus
- Hailo-Erkennung und LiDAR-Distanz laufen im Fusionsskript zusammen
- Hysterese, Stale-Data-Prüfung und Schwellwerte liegen vor Aktuatorik oder Alerting
- Dashboard und finaler Evidenzordner machen die Demo nachträglich prüfbar
Technische Entscheidungen
- Hailo-8L-beschleunigte YOLO-Personenerkennung auf Raspberry Pi 5
- Hokuyo-LiDAR-Distanzbestätigung für Kamera-LiDAR-Sensorfusion
- SAFE/WARNING/ALERT-State-Machine mit Hysterese und Stale-Data-Prüfung
- ESP32-S3-Serial-Kommandos als Aktuatornachweis
- Dark-Mode-Browser-Dashboard mit Live-CSV-Logs, Update-Alter und Event-Tabelle
Herausforderungen
- Maschinenbereiche werden gefährlich, wenn Personen in den Arbeitsbereich beweglicher Teile gelangen. Eine reine Cloud-Kamera-Pipeline würde Latenz, Datenschutzrisiken und Netzabhängigkeit...
- Das Design hält Kamera-Inferenz und Sicherheitsentscheidungen lokal auf dem Edge-Gerät, statt Videodaten an einen Cloud-Dienst zu senden. Beispielkonfigurationen vermeiden private...
- Confidence-Filter, LiDAR-Stale-Data-Schutz, 3-Frame-ALERT-Hysterese, 5-Frame-SAFE-Recovery, Telegram-Cooldown und CSV-Event-Logs machen den Prototyp stabiler und in der Live-Demo...
Lessons Learned
- End-to-End lokale Edge-AI-Sicherheitsüberwachung mit Kamera, LiDAR, Embedded-Aktuatorik, Dashboard und Logs demonstriert
- Demo-Evidenz mit SAFE -> WARNING -> ALERT -> SAFE-Übergängen bei etwa 30 FPS erfasst
- Real-Mode-Evidenz mit kontinuierlichen Raspberry-Pi-Entscheidungen aus Hardware-Inputs protokolliert
- Systemverhalten über Dashboard-Reason-Cards und reproduzierbare CSV-Evidenz nachvollziehbar gemacht
Nächste Verbesserungen
- Diagramme bei größeren Architekturänderungen aktualisieren.
- Dokumentation weiter verdichten: README, Architekturentscheidungen und Screenshots synchron halten.
Tech-Stack
Artefakte
Verwandtes Projekt
Die angrenzende Fallstudie zeigt, wie dieses Projekt in die größere Portfolio-Story passt.
TinyML-Vibrationsanomalie-Erkennung auf Arduino Nano 33 BLE Sense Rev2
Deployt einen leichtgewichtigen Softmax-Klassifikator auf einem Arduino Nano 33 BLE Sense Rev2, um NORMAL-, ANOMALY- und ALERT-Vibrationszustaende aus Onboard-IMU-Daten in Echtzeit zu erkennen.